授权公告号:CN118907027B
授权公告日:2025.03.04
申请号:2024109912961
申请日:2024.07.23
同一申请的已公布的文献号:CN118907027A
申请公布日:2024.11.08
专利权人:齐鲁工业大学(山东省科学院)
发明人:李梦丽;
分类号:B60S9/205(2006.01)I; 收起
B62D63/02(2006.01)I;B62D63/04(2006.01)I;B60B19/12(2006.01)I;专利代理机构:北京万新知识产权代理有限公司16195专利代理师:张慧对比文件:CN 111409062 A,2020.07.14
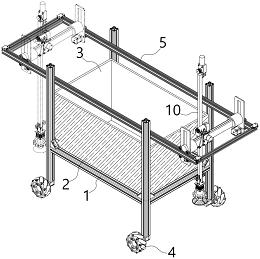
摘要:本发明提供一种自主避障搬运机器人,涉及搬运机器人技术领域,包括主体机架,所述主体机架围合形成置物舱体,所述主体机架底部四角安装有麦克纳姆轮,所述轨道滑杆上平移滑动式安装有横向轨道梁,所述横向轨道梁上通过滑动座安装有机械臂;所述吸盘机械臂包括负压吸盘,所述负压吸盘底部设置有与触地吸盘连接的电磁铁,随着吸盘立柱向下移动,从而推动主体机架的一侧向上抬高,从而帮助主体机架越过障碍物,本发明采用了吸盘机械臂和夹持机械手相结合的方式,确保了物品在抓取和搬运过程中的稳定性和安全性,同时吸盘机械臂不仅作为货物的抓取装置,还作为车体的越障支撑装置,大大丰富了转运机器人的功能,有效提高了自主移动的能力。



